Background
These instructions describe how to build a balancing robot with a color sensor for detecting the line and gyro sensor for calculating balance. These instructions require only parts found in the standard EV3 education core set.
Building Instructions
Motor Module

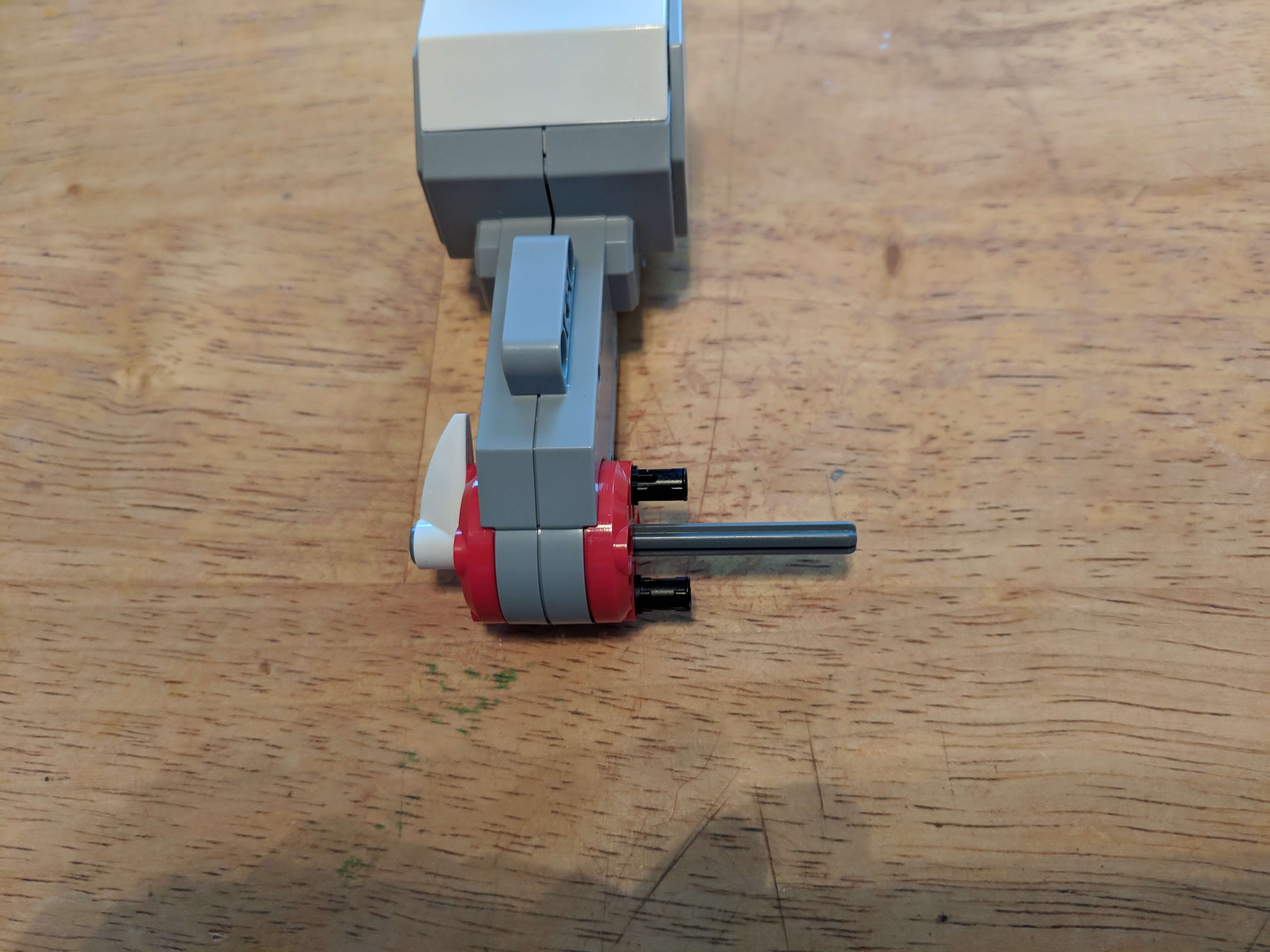
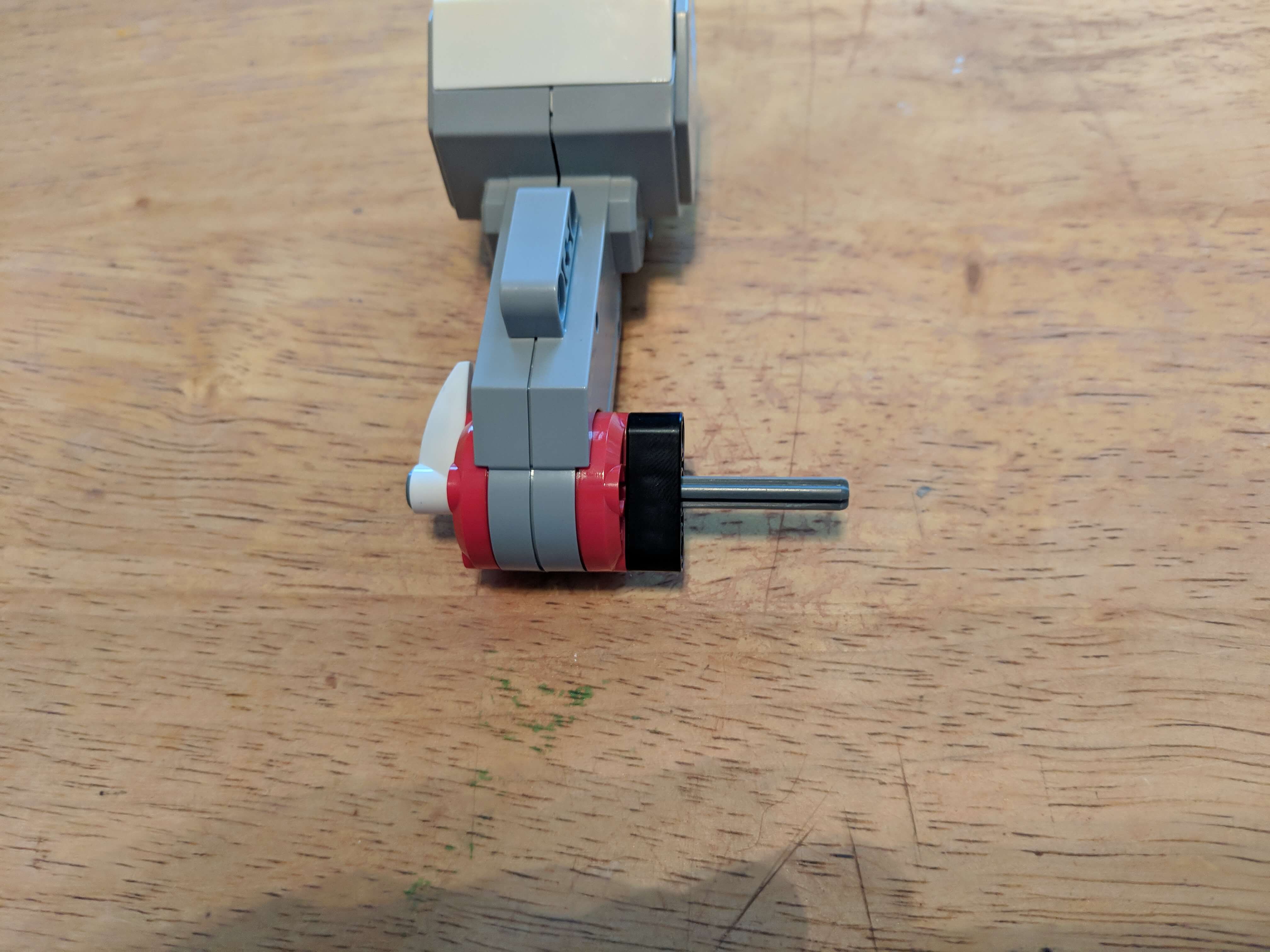




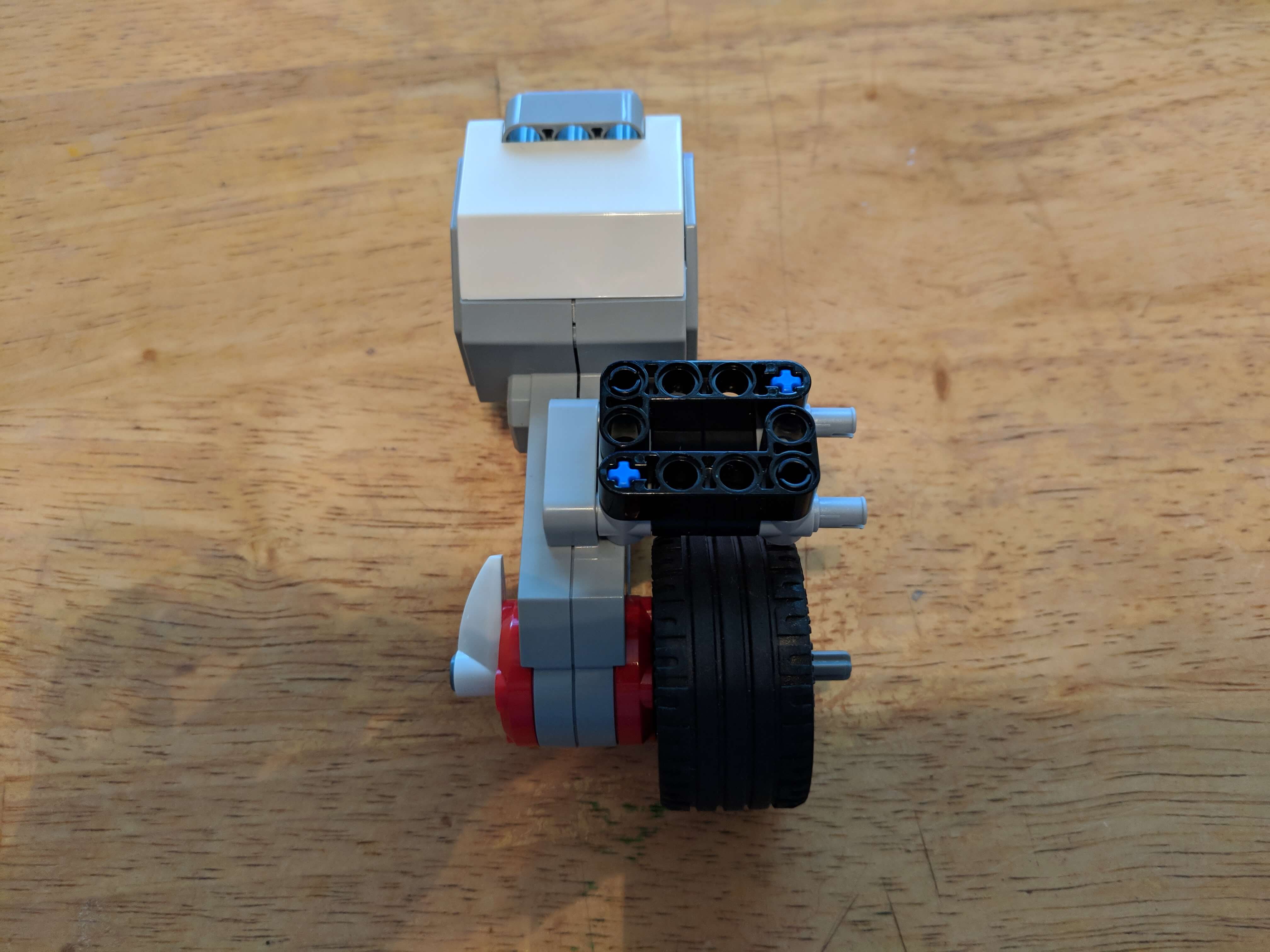
Build a second motor assembly as a mirror image of the first.
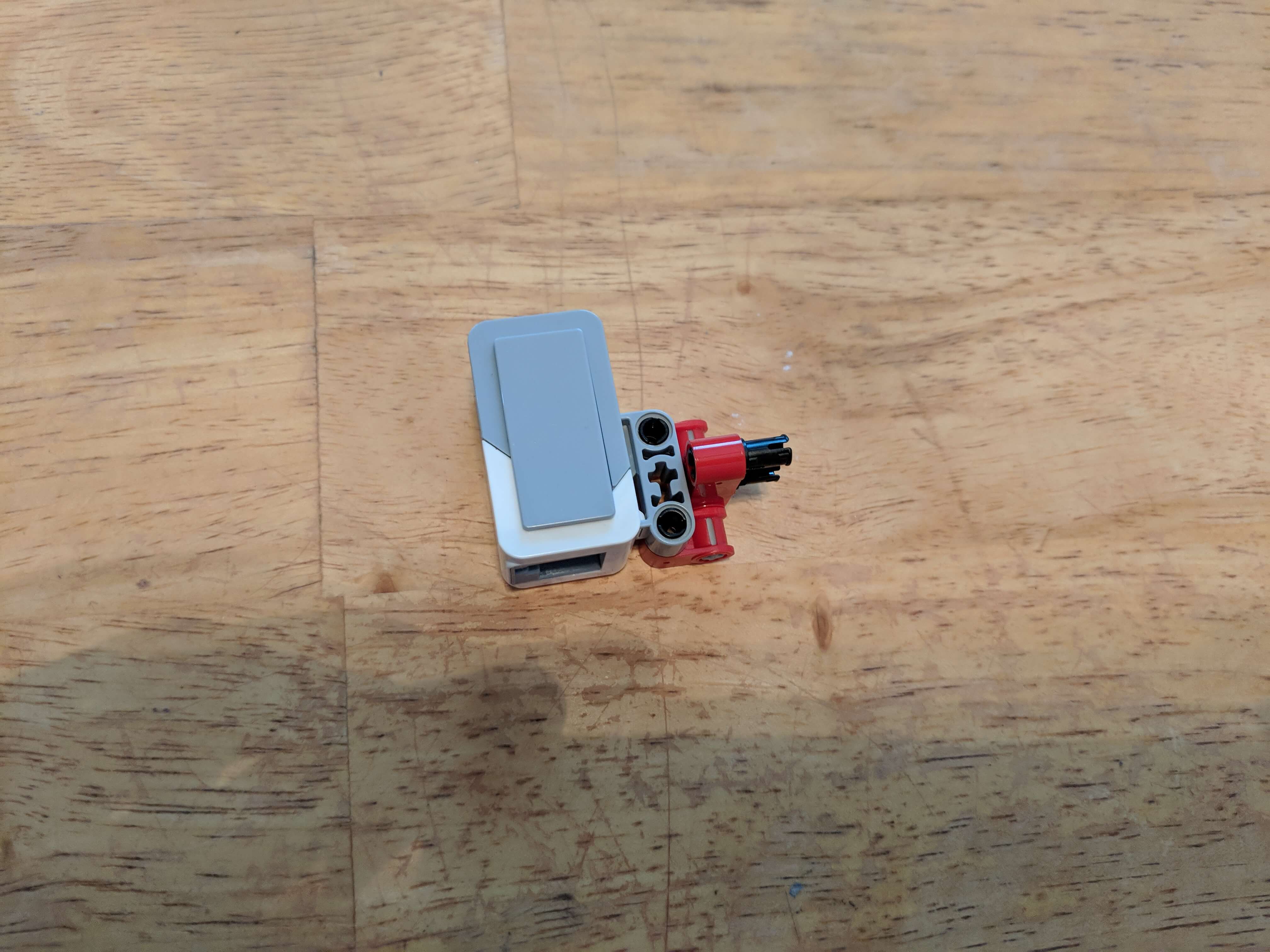
Light Sensor Module

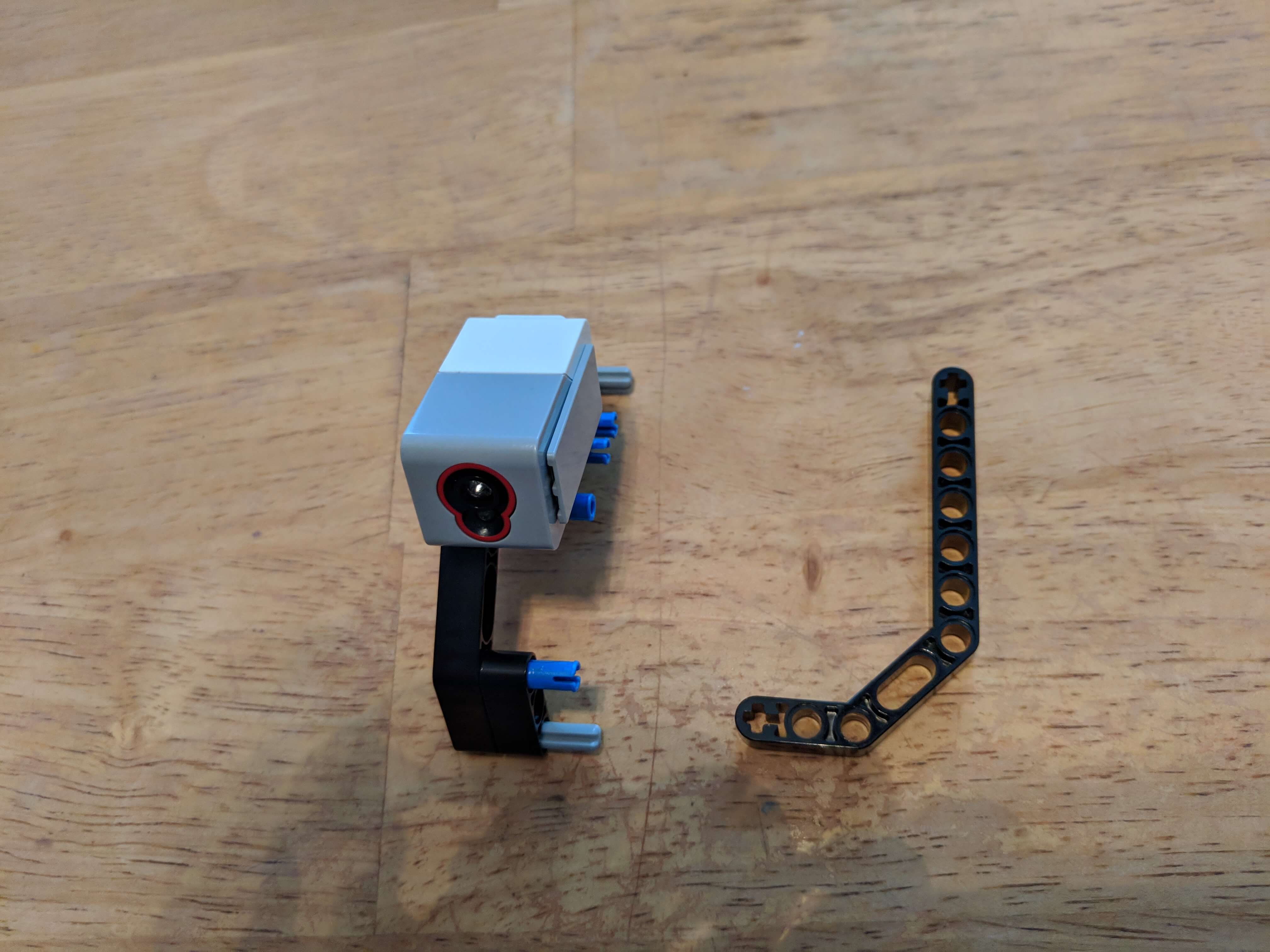

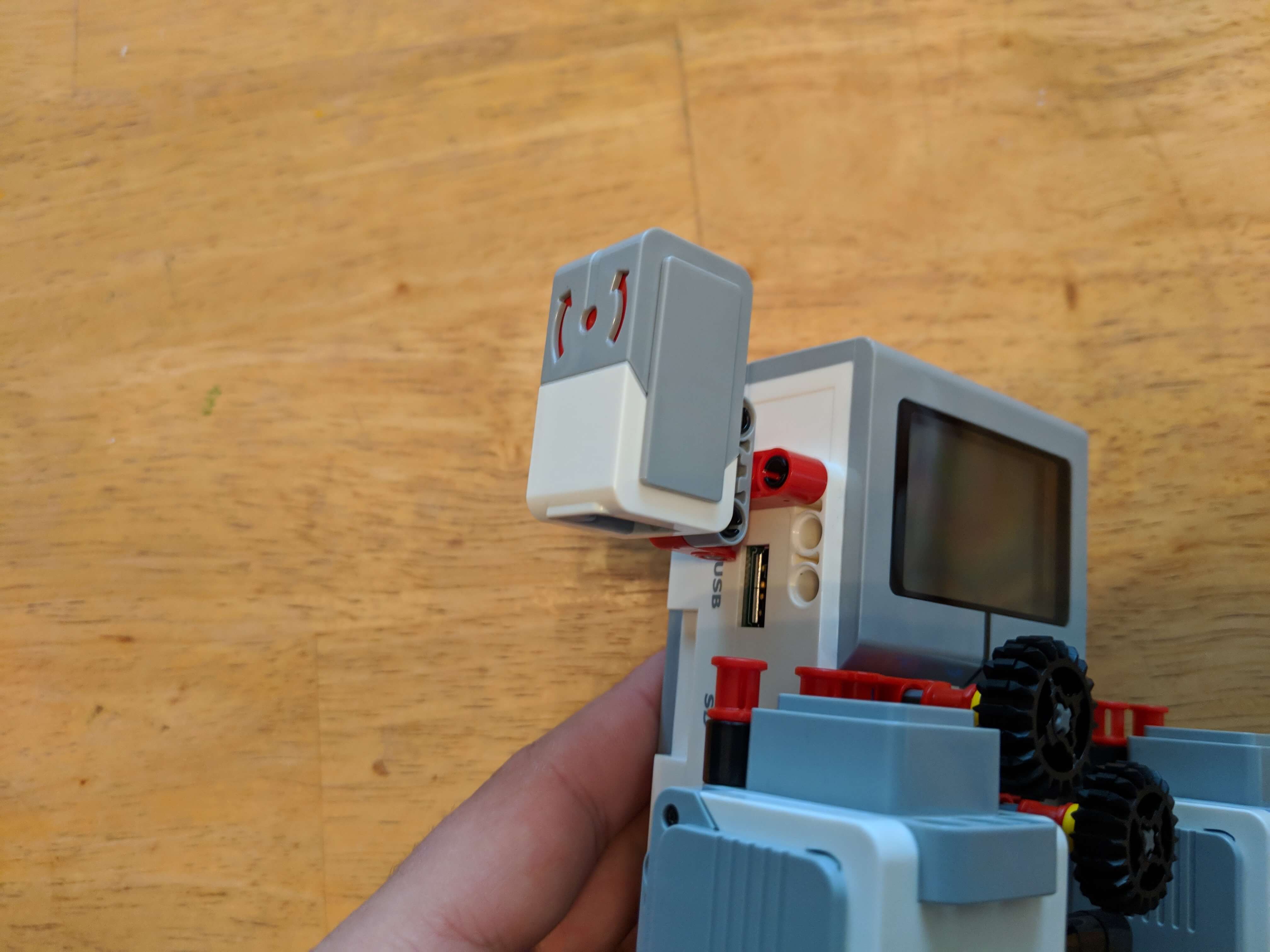
Gyro Sensor Module



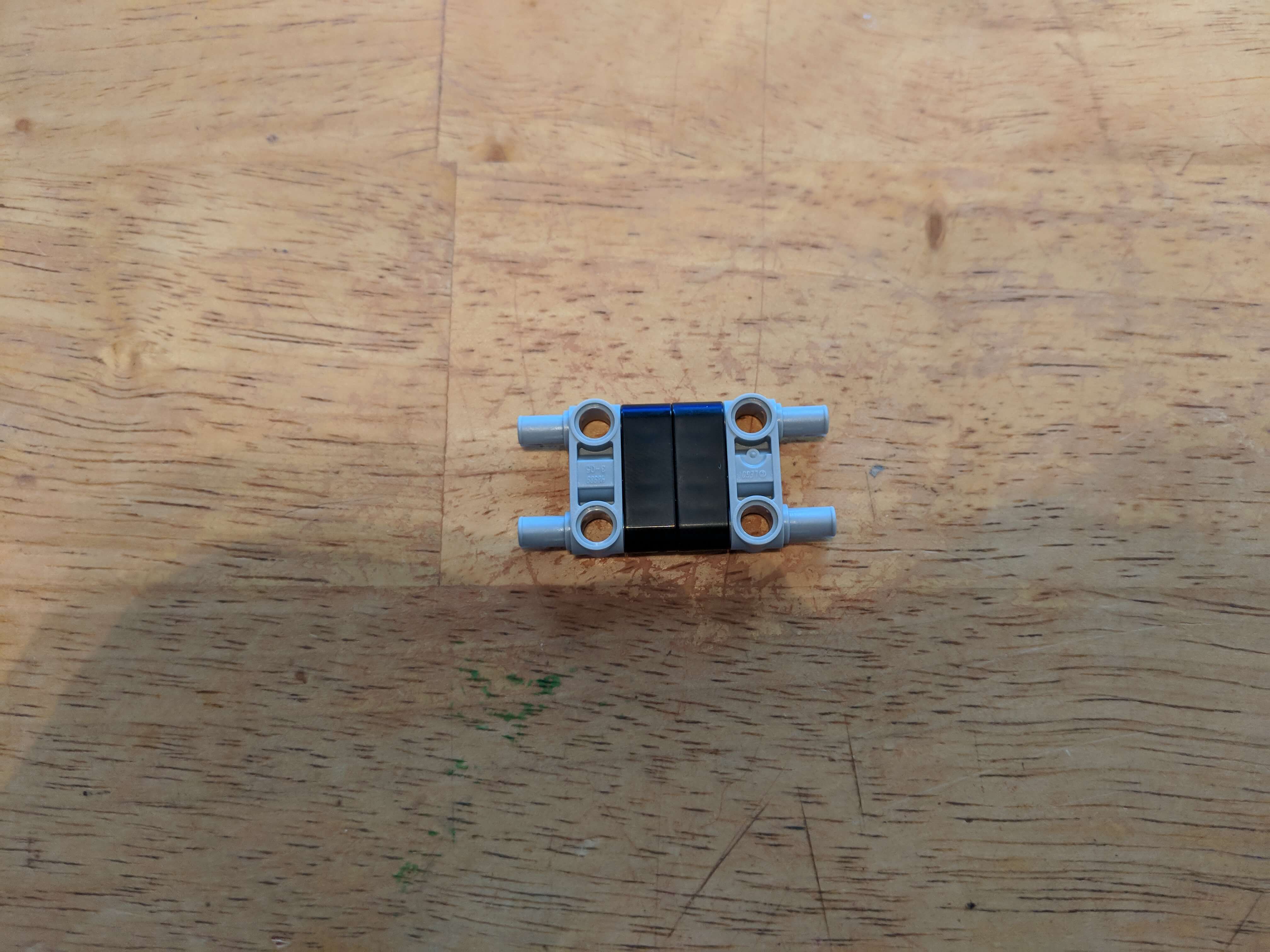
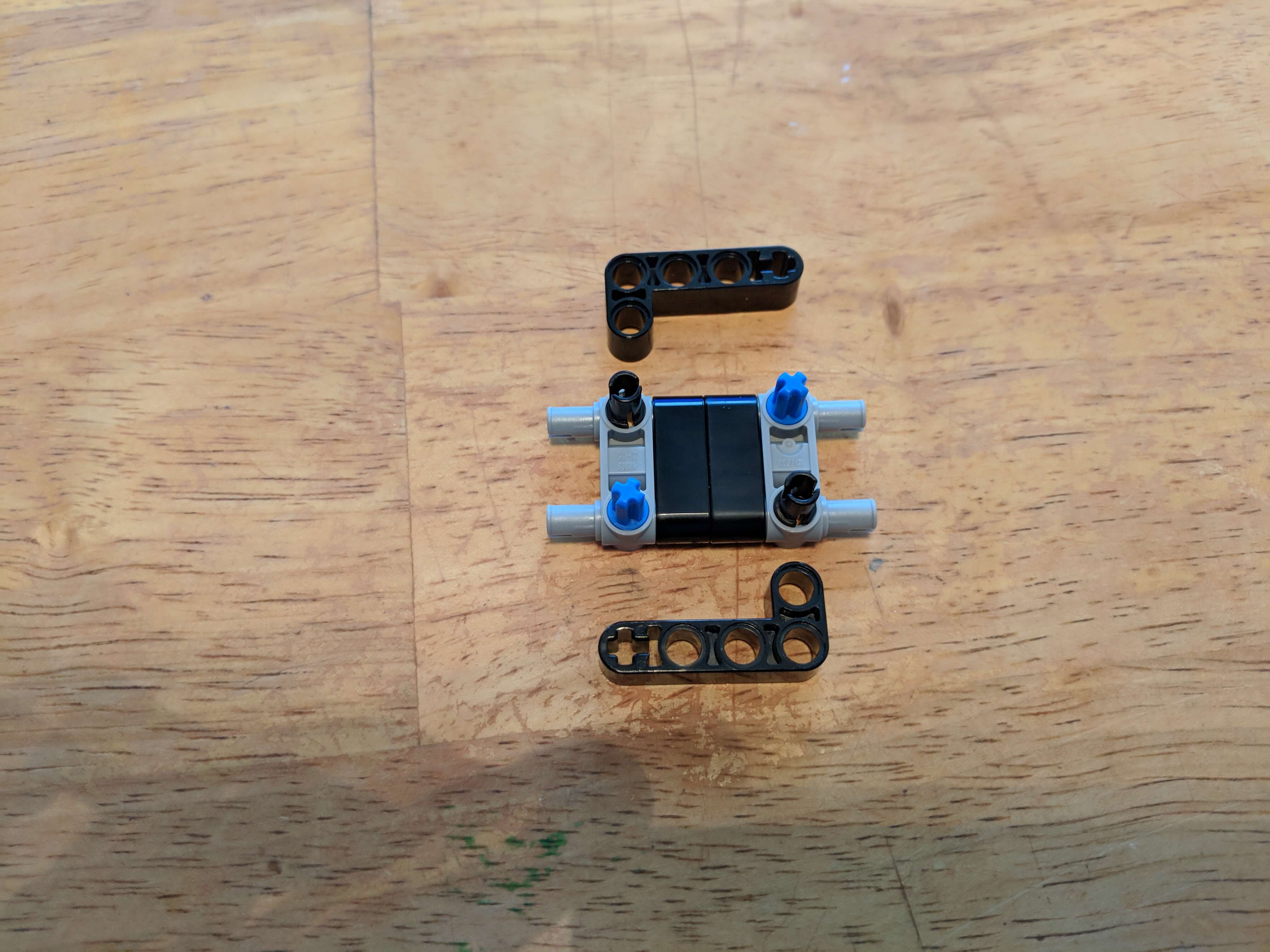
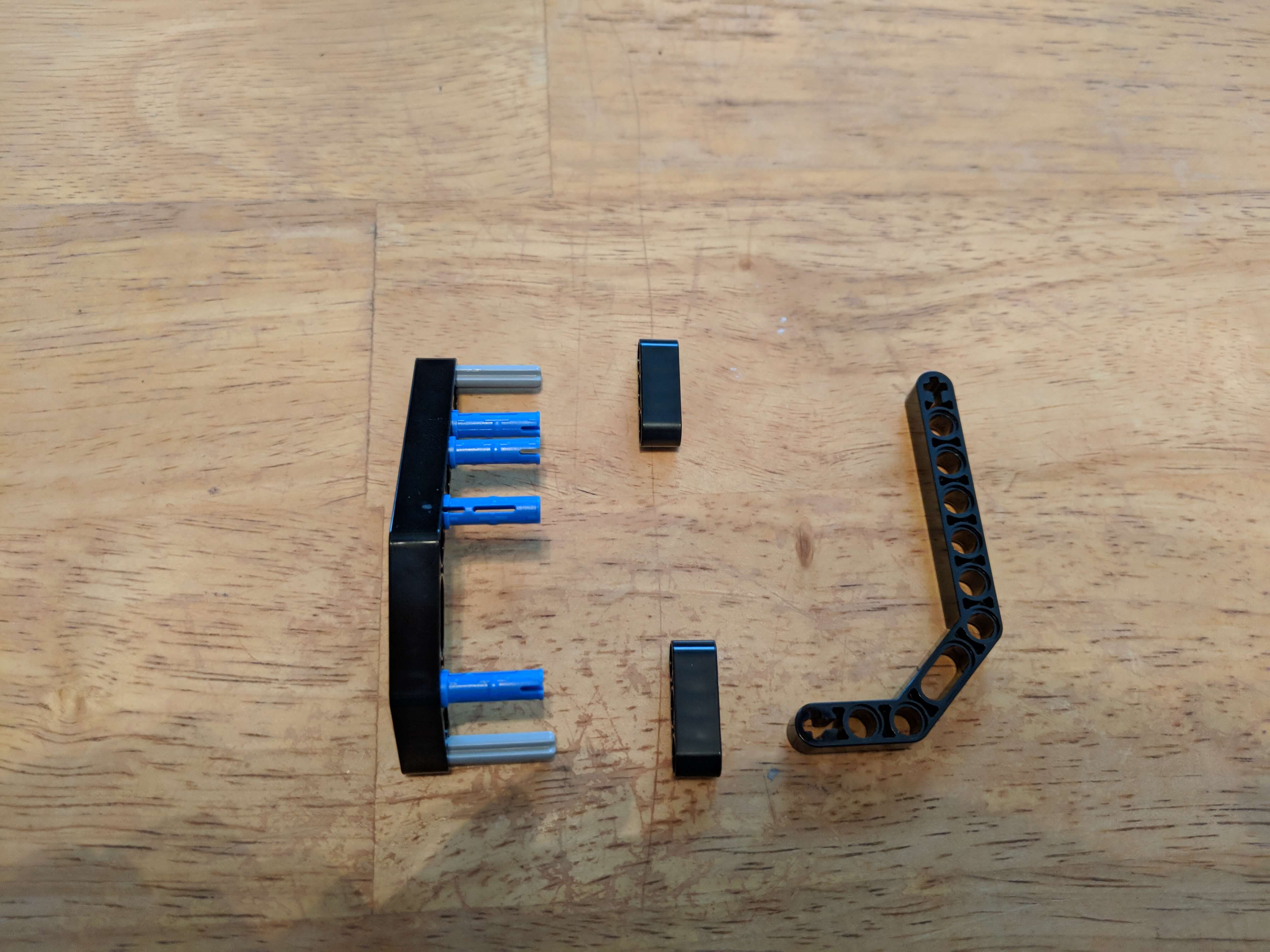
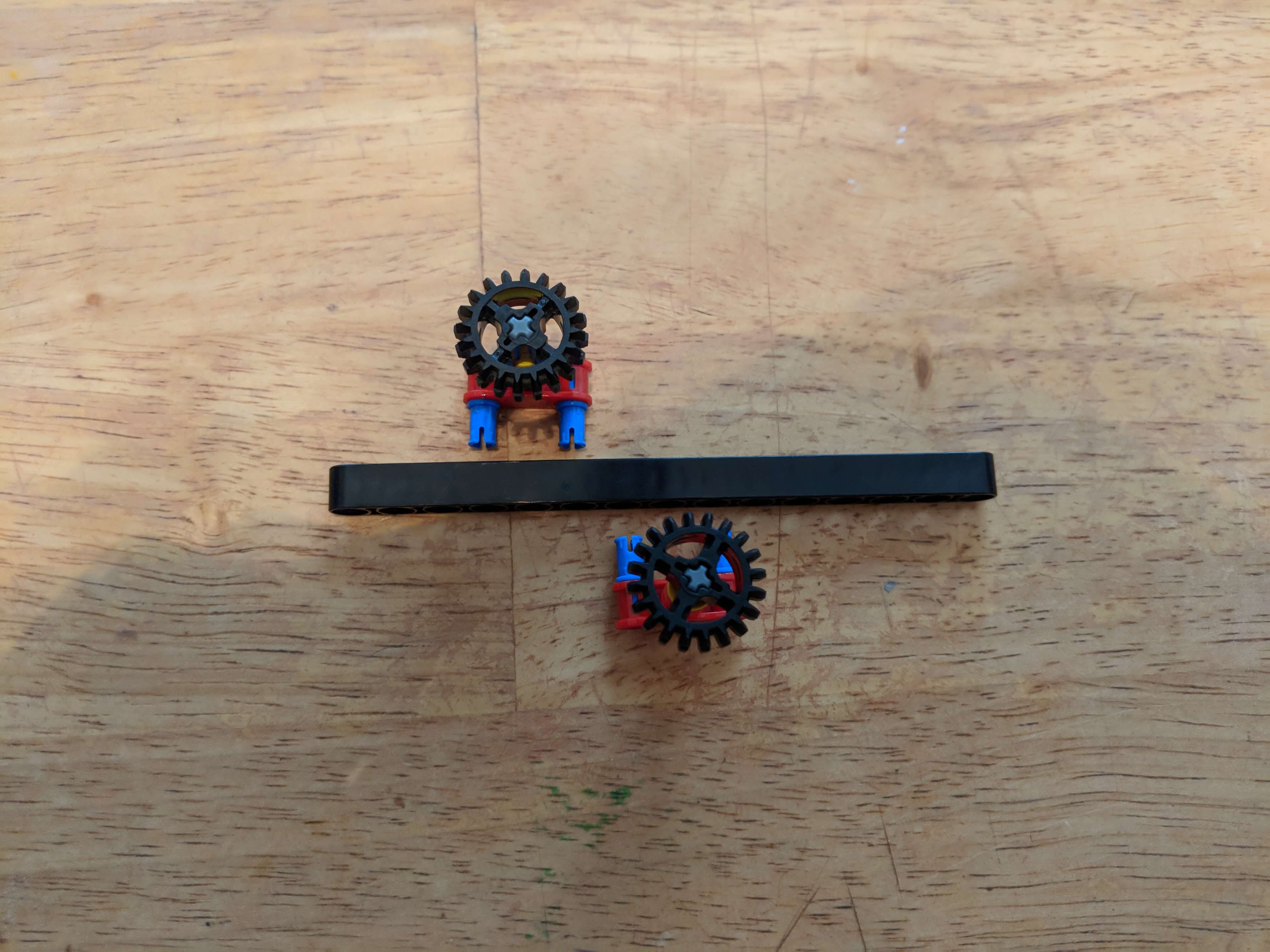
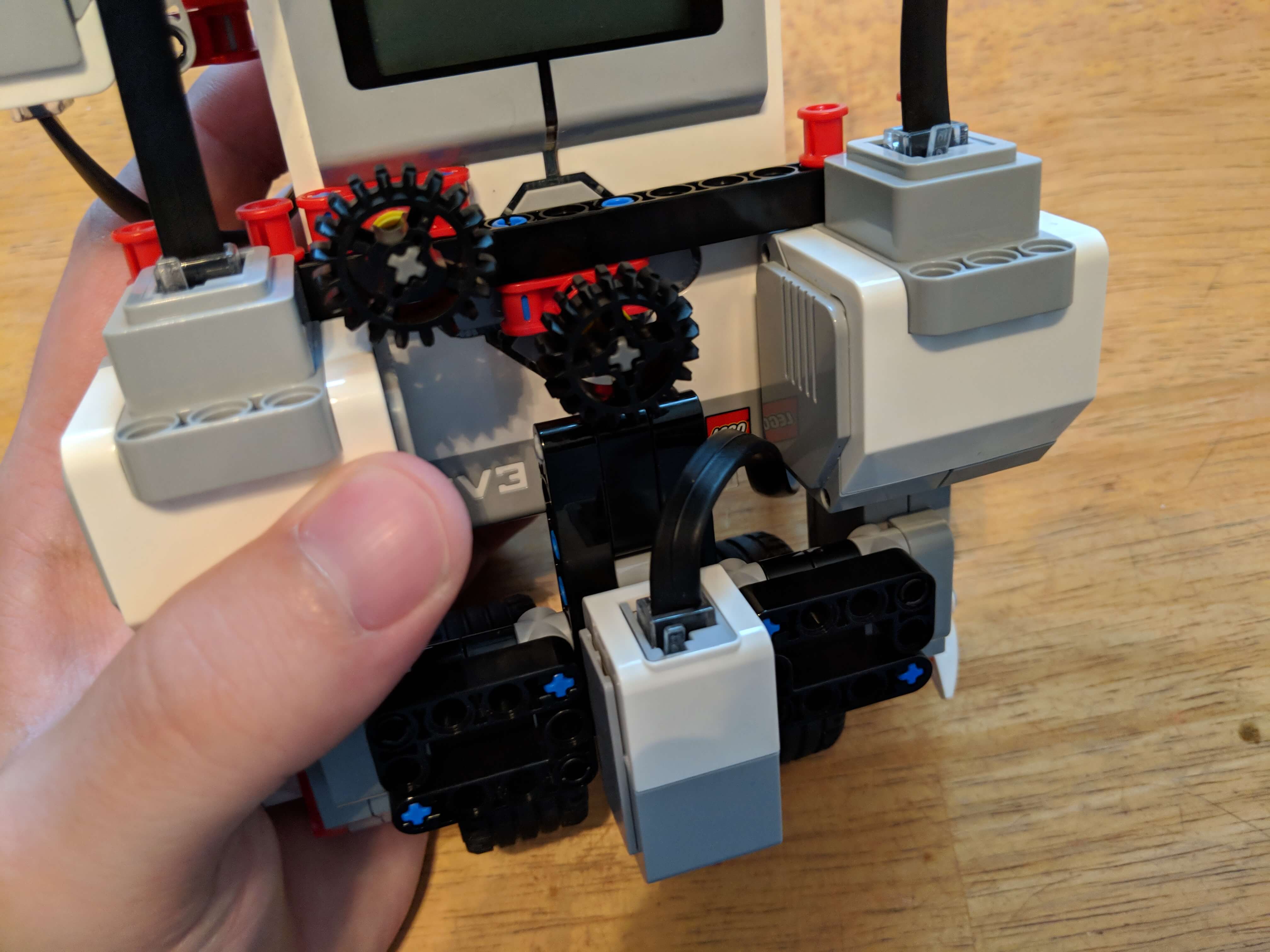
Connector Bar Assembly

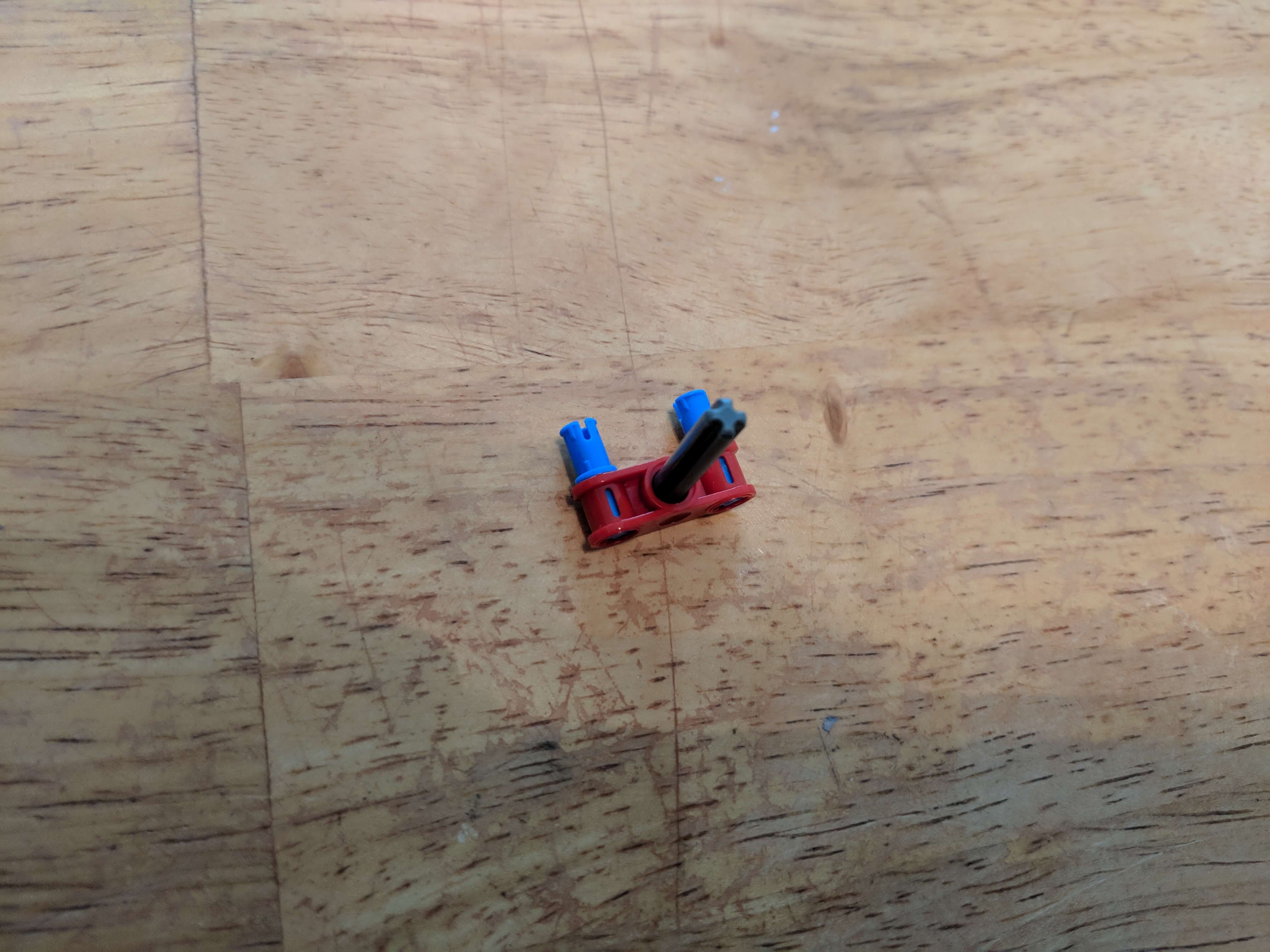


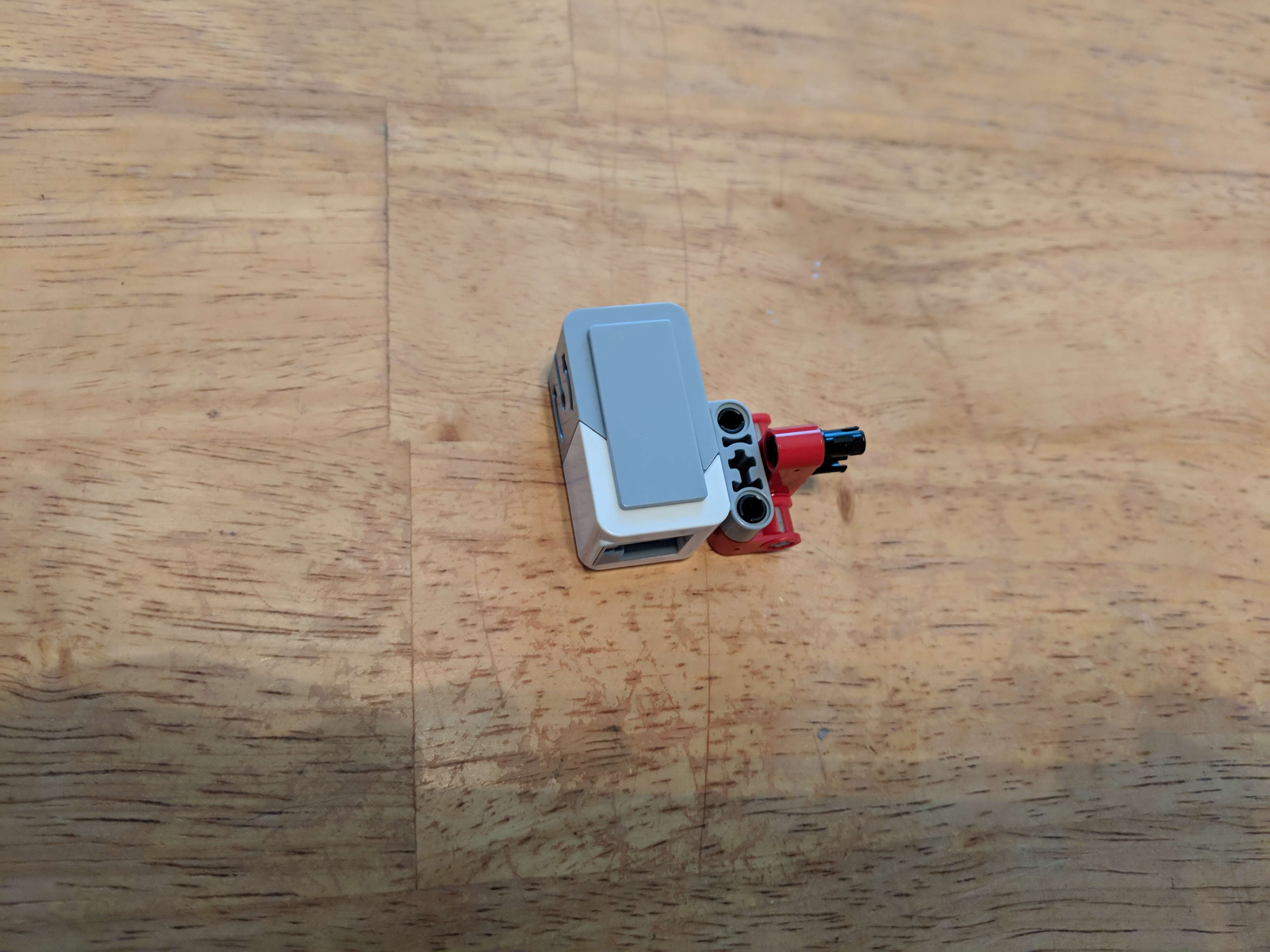
Build two of these button assemblies.

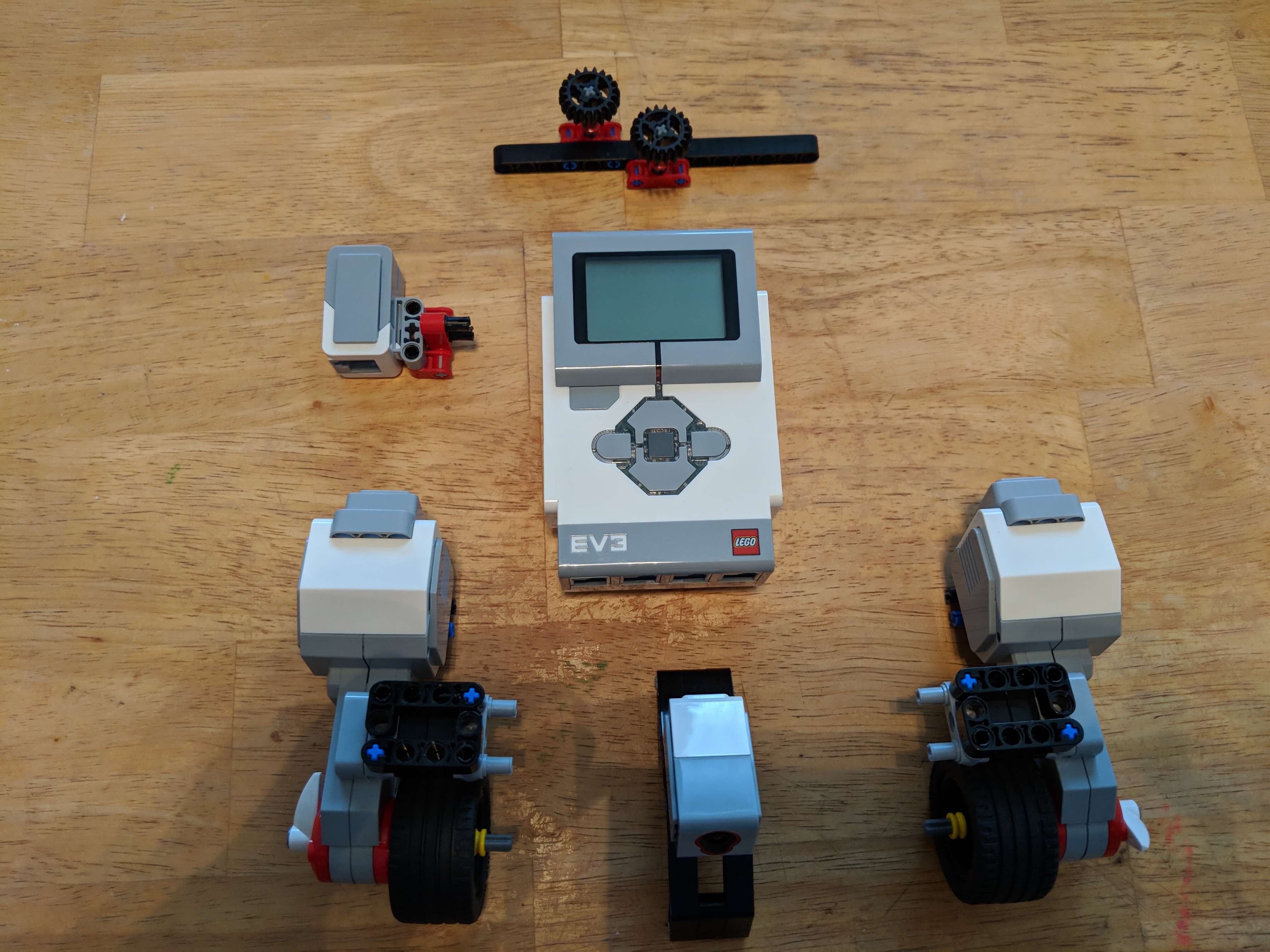
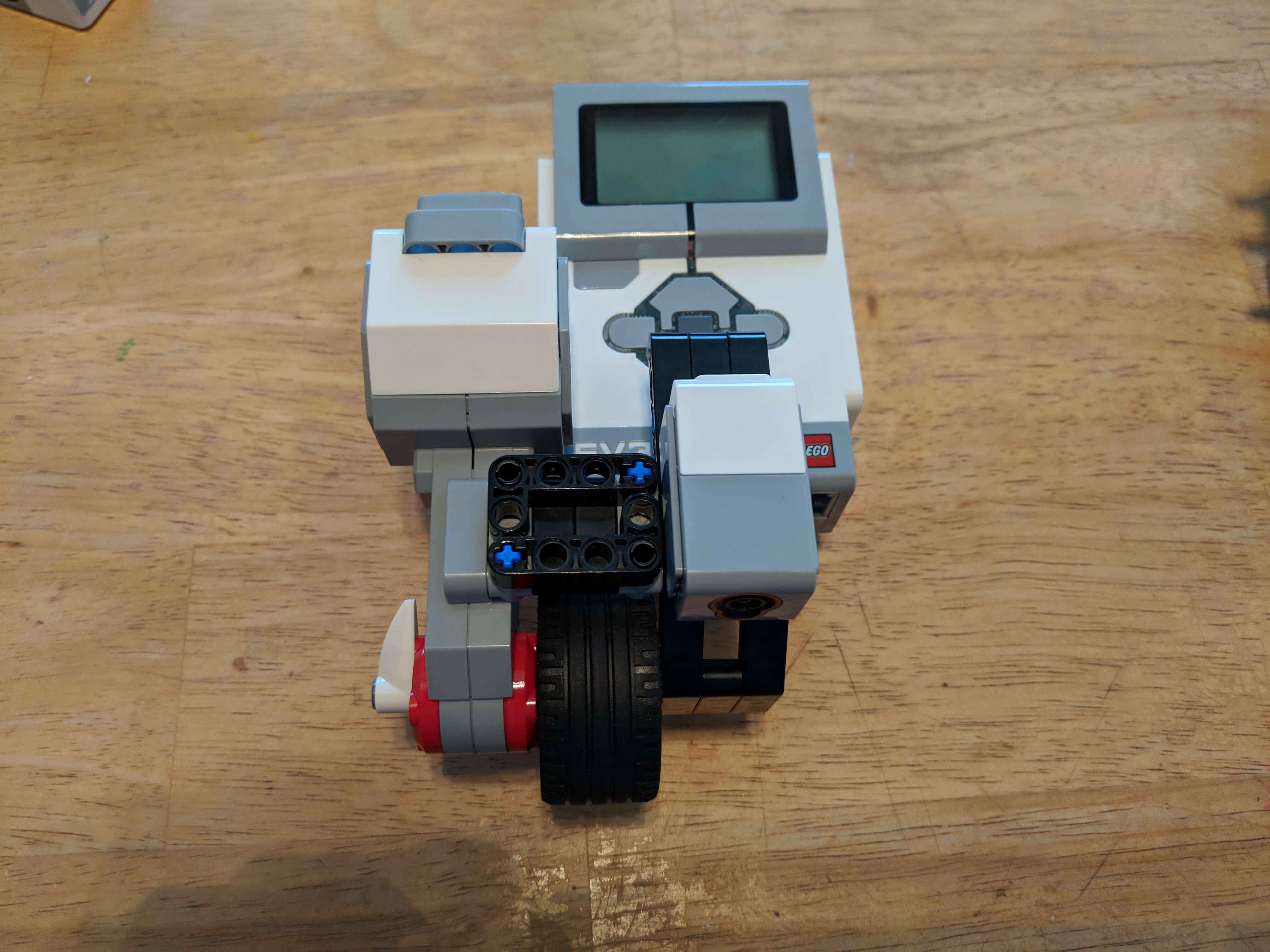
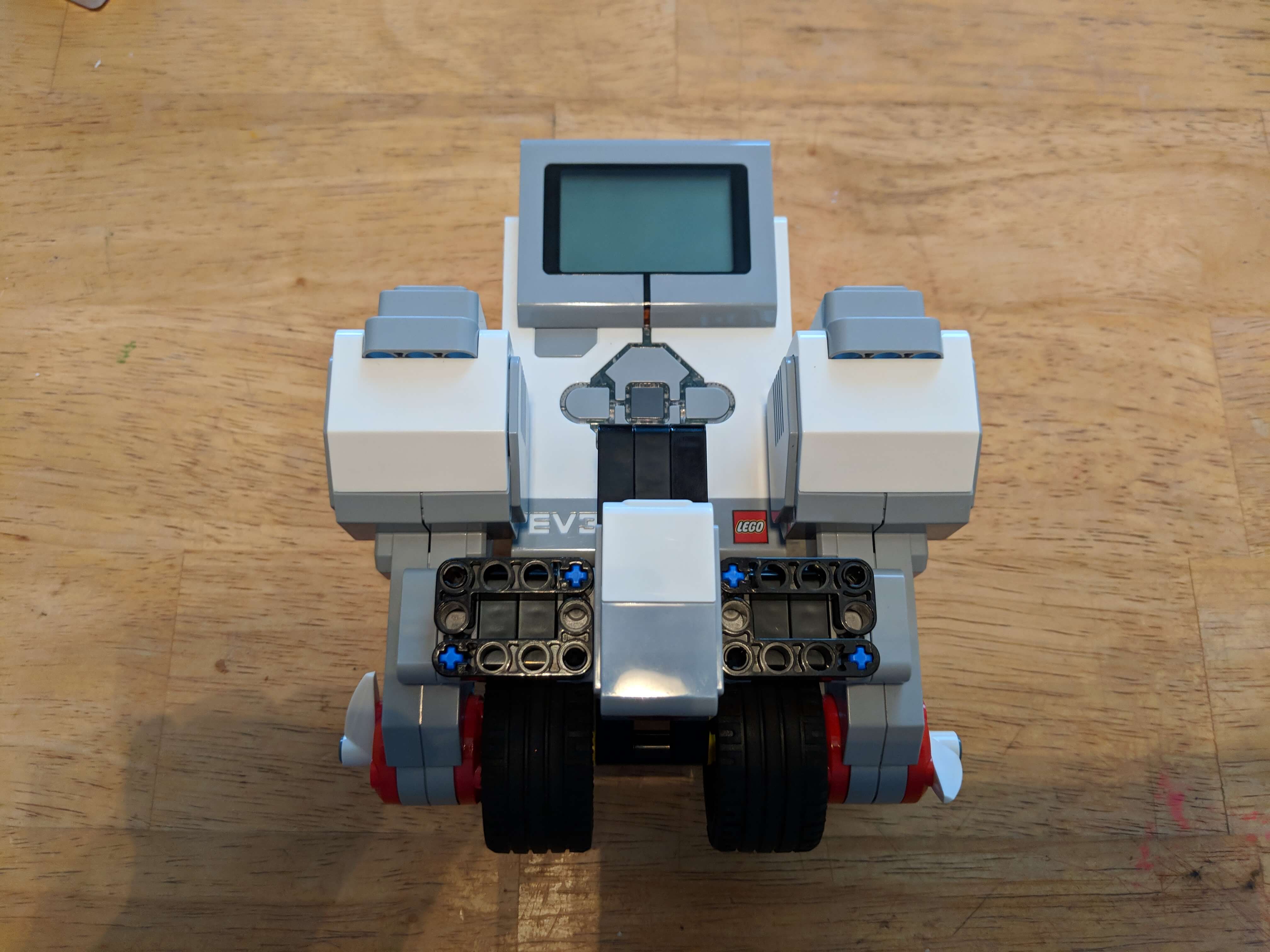
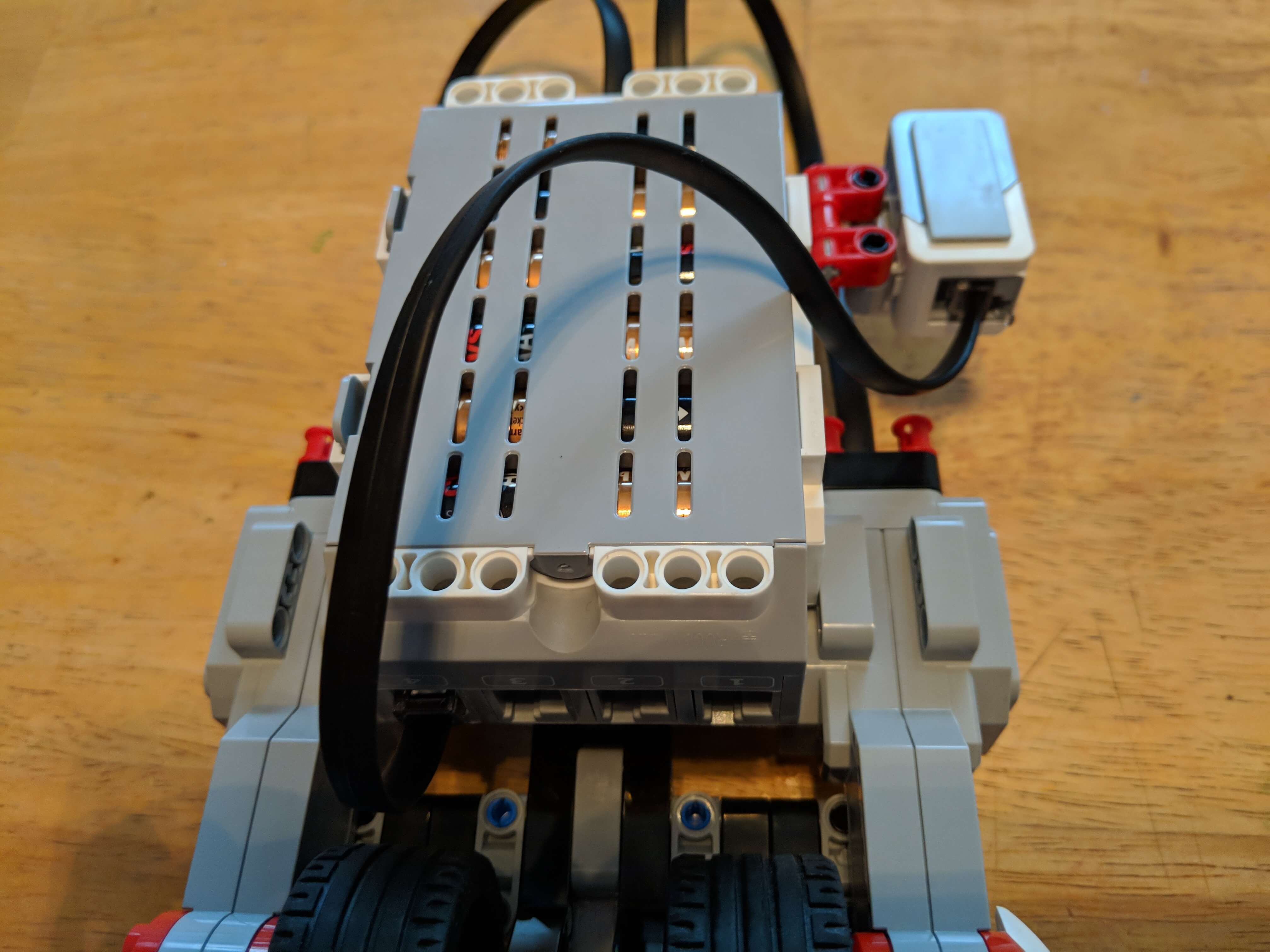
Complete Assembly

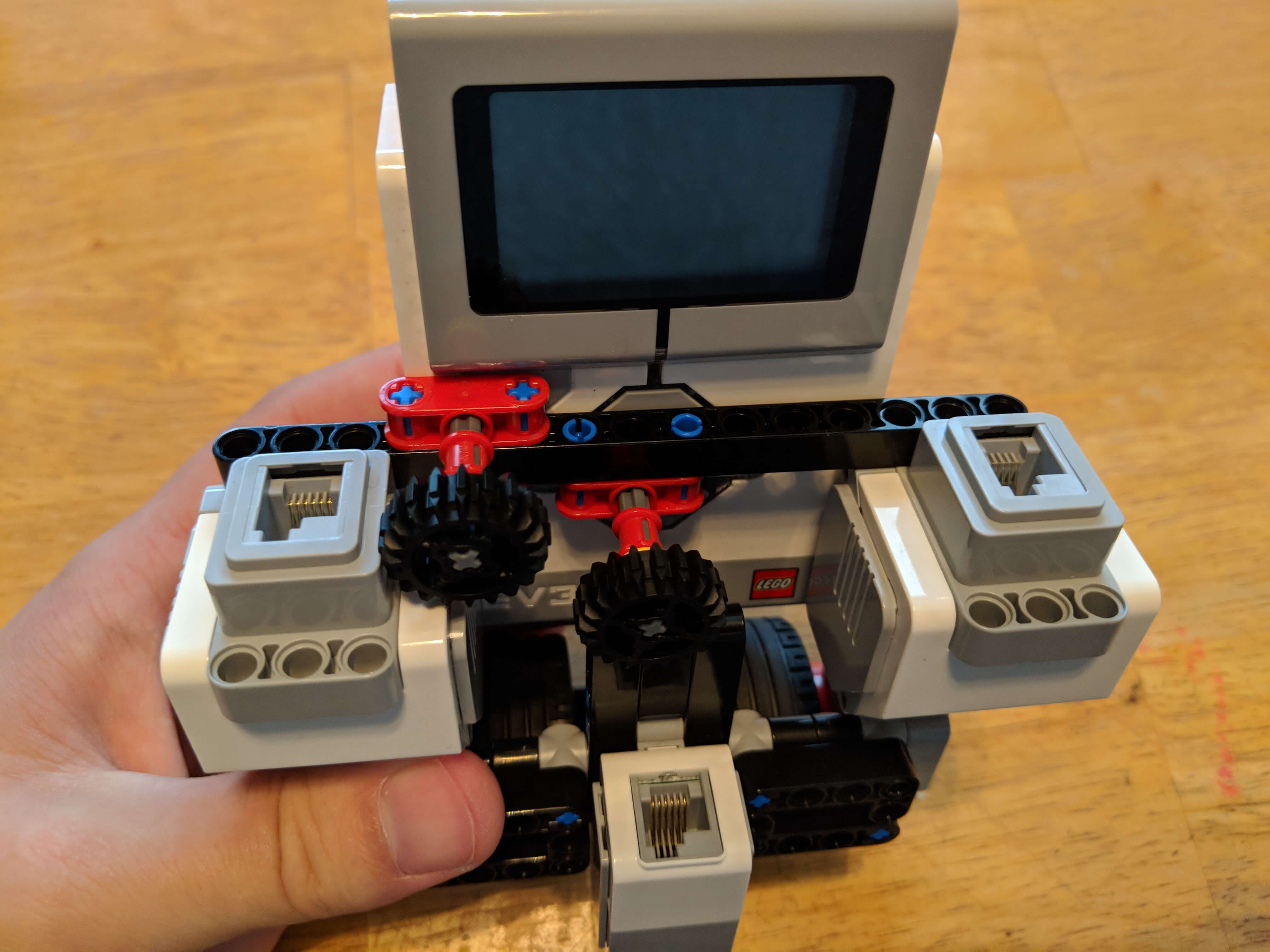
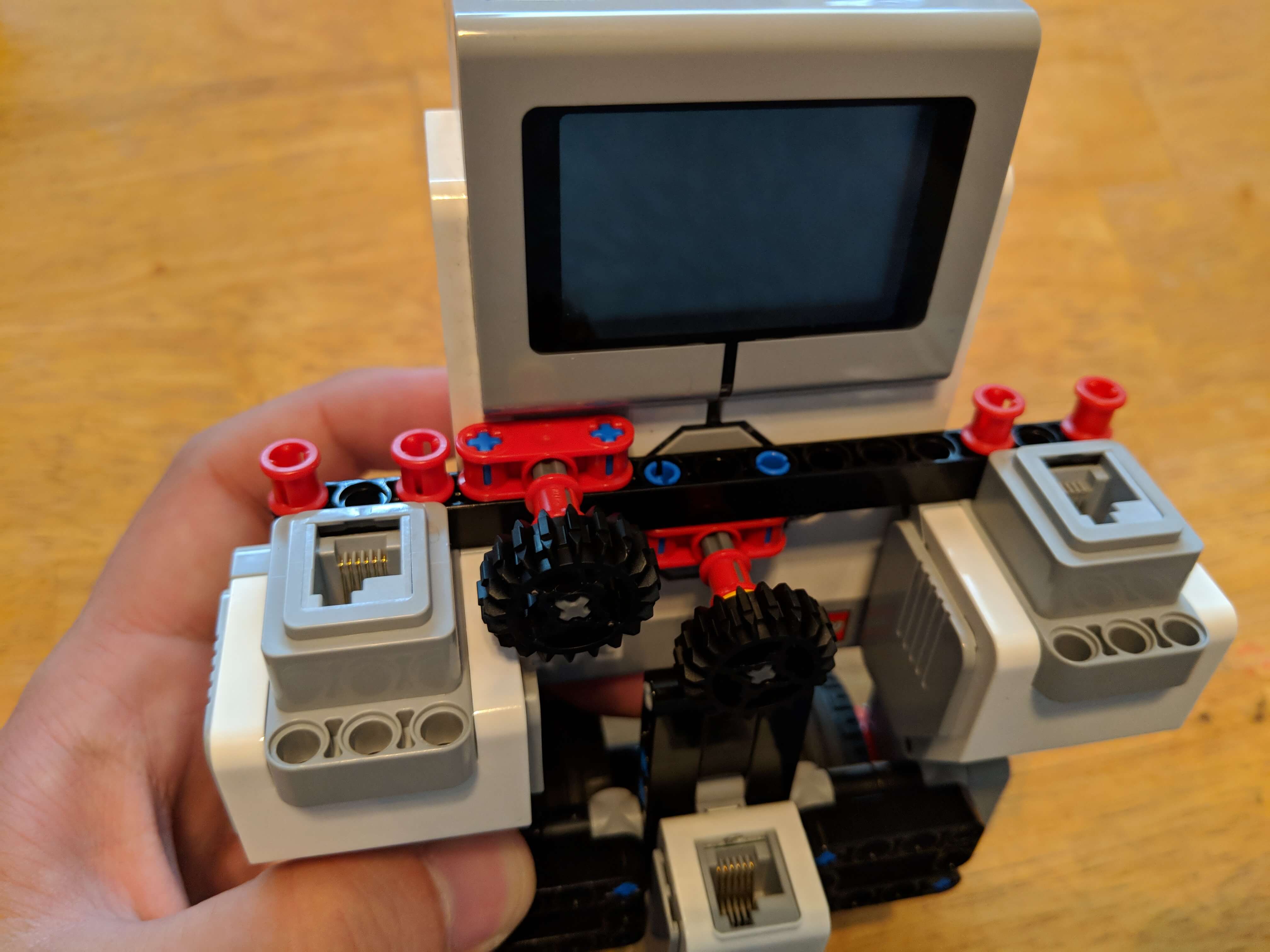
Attach the connector bar with 4 red pins.
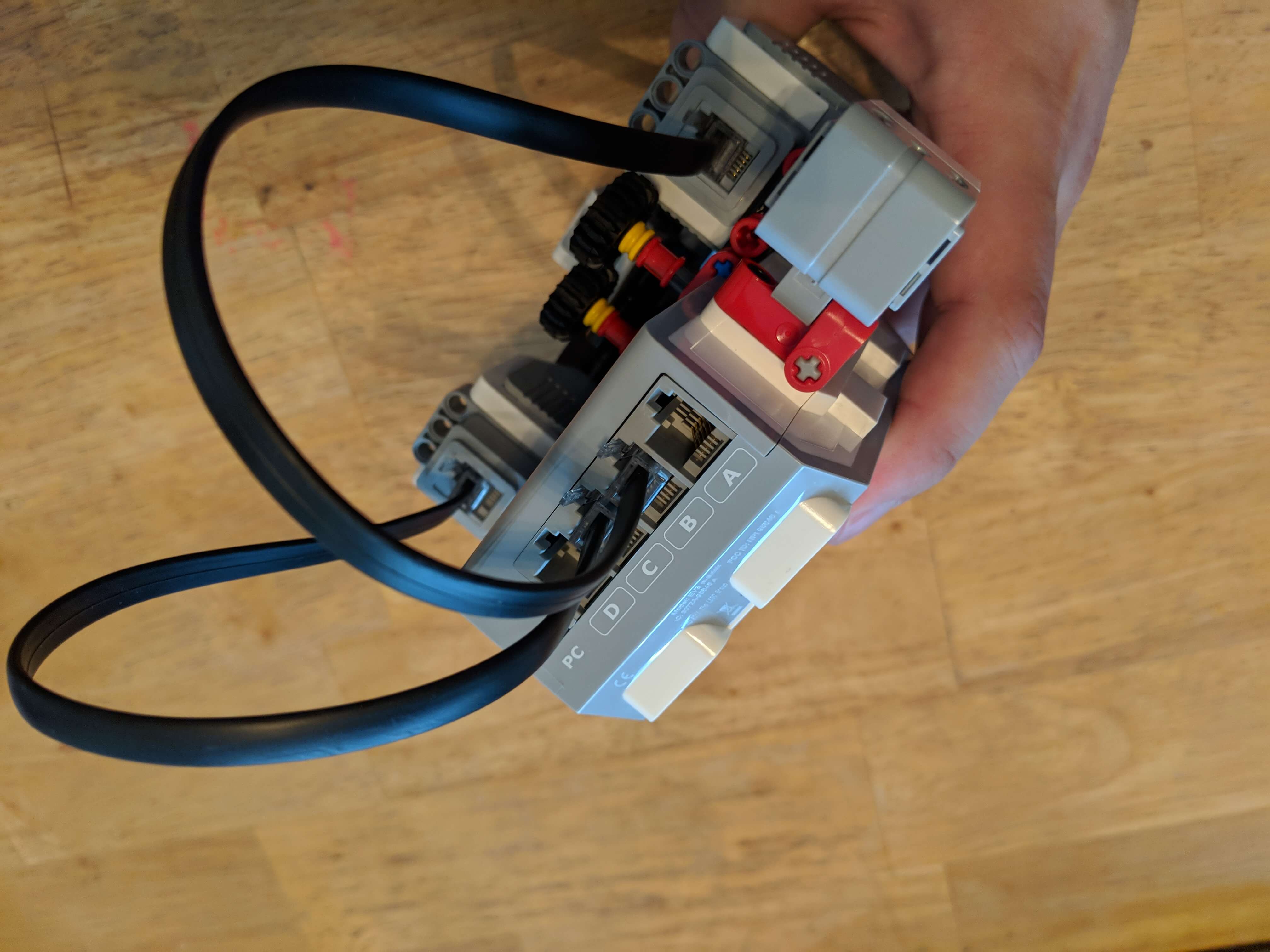
Plug the left motor into motor port C. Plug the right motor into motor port B.
Plug the gyro sensor into sensor port 4.
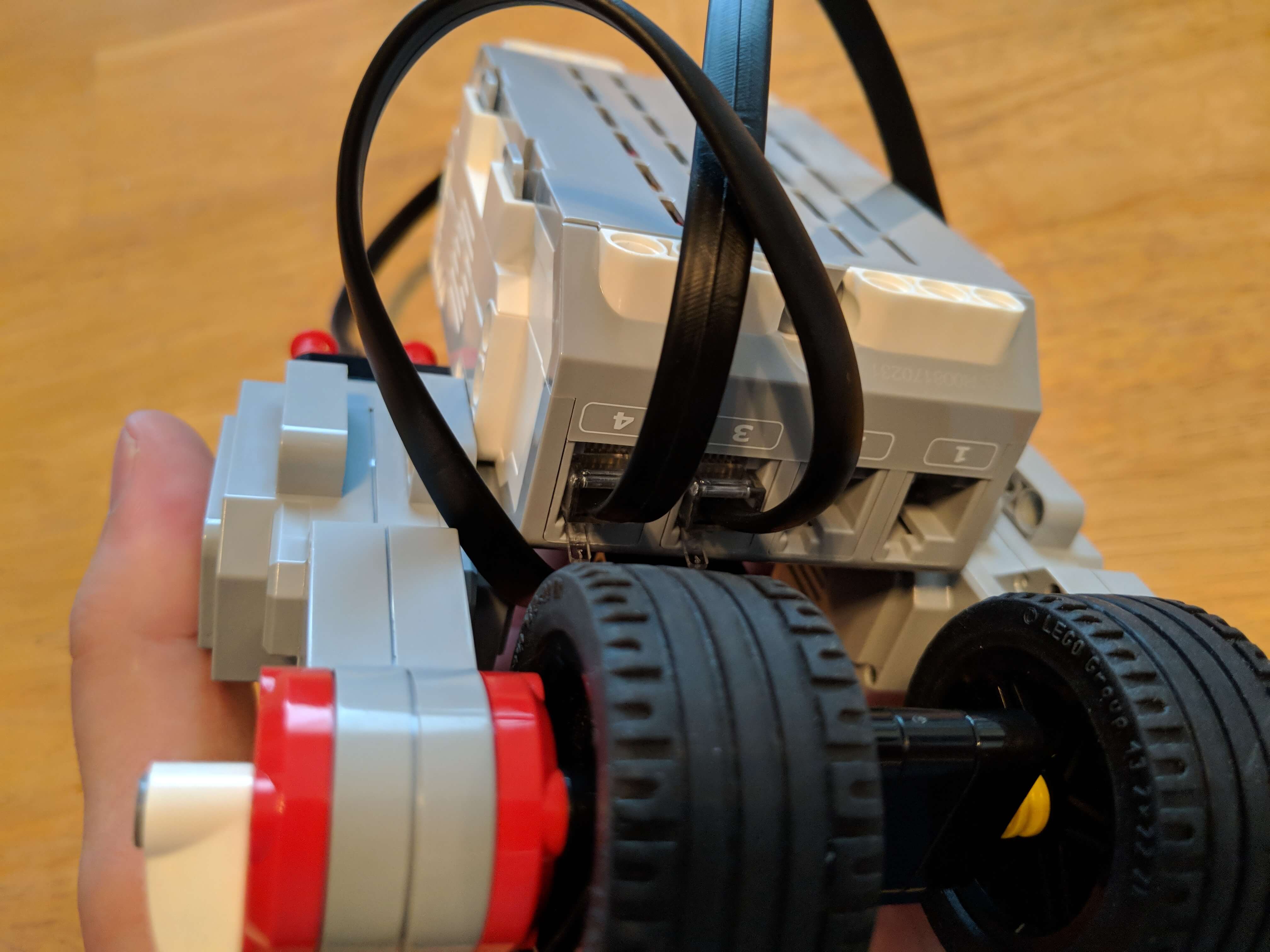
Plug the color sensor into sensor port 3.
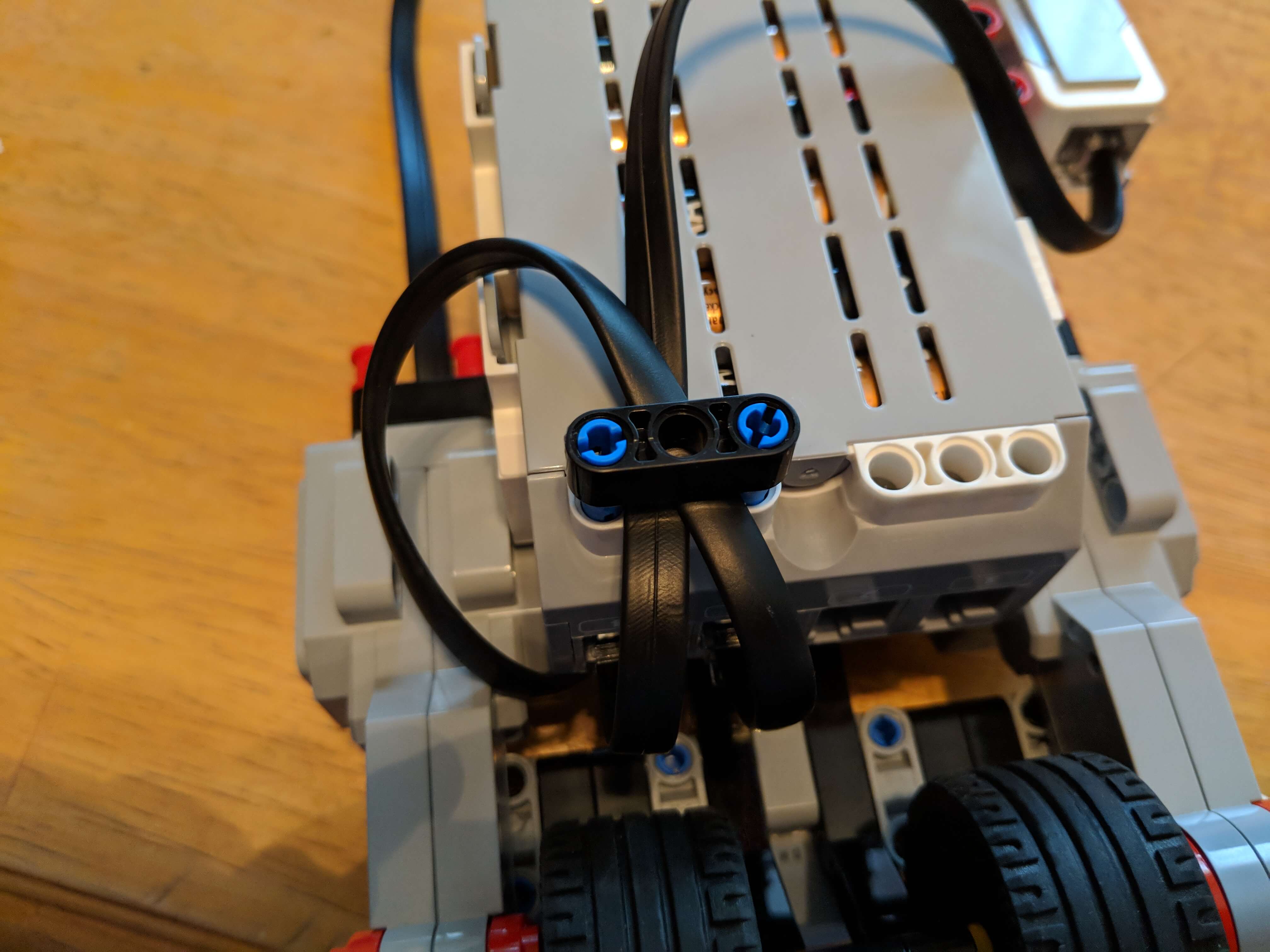
Optional: secure the sensor wires away from the rotating wheels with a 3-rail and two blue pins.
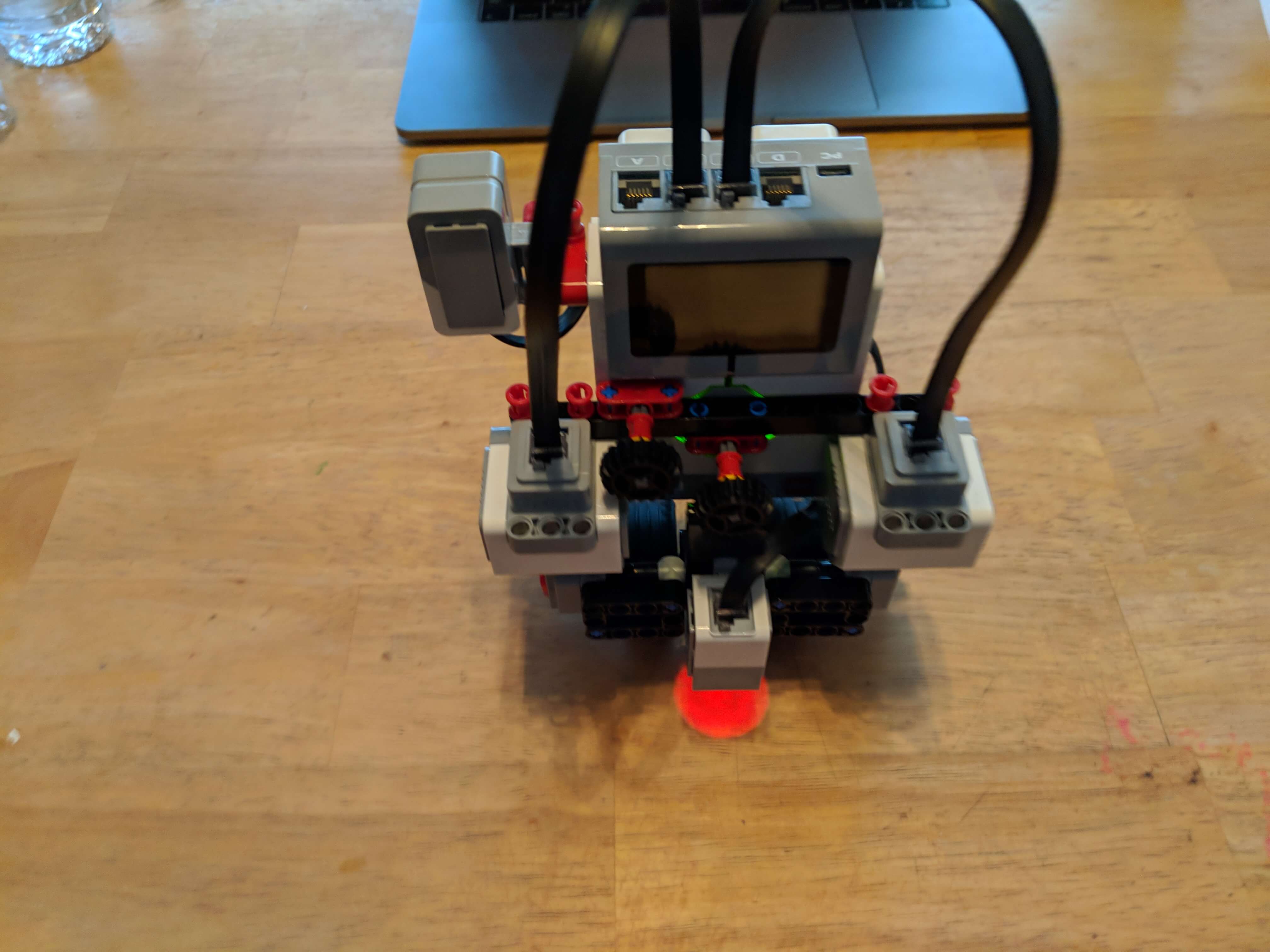
Congratulations
You have completed your EV3 balancer robot.
A printable template for a paper wrapper for this robot can be found here. When printed on colored card stock, this wrapper can be used to enable color based visual location tracking of the robot.