The simples and easiest way to initialize preexisting instance is using dynamic initialization.
Dynamic initialization uses sequences of action language statements to create, relate and set attributes of preexisting instances. This form of initialization has been supported by MC-3020 since the first release (1.0).
Action language statements in initialization functions (or previously in init objects) are executed once when a system first starts. The action language statements perform create statements to create the preexisting instances. Relate statements execute to establish associations between these newly created instances. Action languages statements are executed which write the attribute values of the preexisting instances.
When all of the action language statements are complete for all
init functions (tagged with
TagInitializationFunction), then all preexisting
instances are fully established and initialization is complete.
Advantages to dynamic initialization include:
| flexibility | It is easy to add, delete and/or change dynamic initialization. This is done by simply adding, deleting and/or changing the action language in the init functions. |
| simplicity | Dynamic initialization is simple and easy to understand. |
Disadvantages to dynamic initialization include:
| memory space | The space in the system instruction store used by the initialization action language statements can be substantial. This space is not availabe for use after the init process is complete. |
| speed | It takes time (execution time) during bring-up to create, relate and populate the preexisting instances. |
The basic building block for specifying preexisting instances is the initialization function. This approach provides the user with the ability to use the same set of preexisting instances for simulation with the BridgePoint Verifier as are used during the actual execution of the system on the target platform.
Initialization functions contain the action language that describes the set of preexisting instances for the subsystem or domain. Initialization functions are normal functions and can be invoked during normal system execution as well as at start-up.
The rules for constructing initialization functions are enumerated below.
Each subsystem can have one to many initialization functions. The functions will be invoked in alphabetical order during bring-up. Initialization functions are identified by marking in the
domain.markmarking file.Initialization functions are tagged with the marking function
TagInitializationFunction.Initialization functions can take no arguments. Return values will be ignored.
Figure 8.1, “Autosampler Class Diagram” shows the xtUML class diagram
for the autosampler example model. Note that the autosampler
example model can be found in the examples
directory of your MC-3020 installation.
Figure 8.2, “Autosampler Init Function”
shows the action language statements contained in the initialization
function for the autosampler domain. The function is marked as
an init function with the statement
TagInitializationFunction( "setup" )
in the domain.mark marking file.
This init function executes
creates, relates and attribute writes to establish all preexisting
instances. The function runs once and only once at system
start.
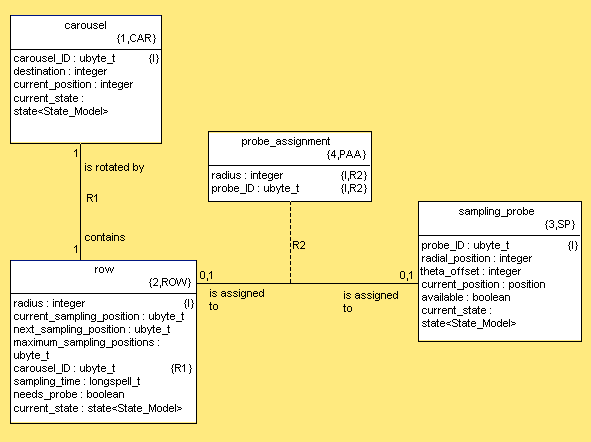
Figure 8.2. Autosampler Init Function
create object instance car of CAR;
car.carousel_ID=10;
car.current_position=10;
create object instance row of ROW;
relate row to car across R1;
row.radius=10;
row.current_sampling_position=0;
row.maximum_sampling_positions=20;
row.sampling_time=3000000; // 3 seconds
row.needs_probe=false;
create object instance probe of SP;
probe.probe_ID=1;
probe.radial_position=20;
probe.theta_offset=40;
probe.current_position="up";
probe.available = true;
In systems with more than one domain, dynamic init is only
slightly more complex. Initialization functions are written for
each domain. These multiple init functions establish the
preexisting instances (PEIs) for the multiple domains. The init
functions are each marked with
TagInitializationFunction in each domain's
corresponding domain.mark marking
file.
In some systems it is important that certain domains be
initialized before other domains. Or, there may be requirements on
the ordering of the initialization between domains. In these cases,
a function in only one domain is tagged as an init function (using
TagInitializationFunction). This function
then invokes functions in the other domains, thus imposing the
desired order on the initialization sequence.