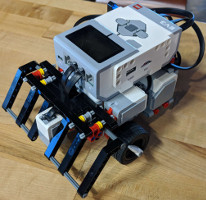
EV3 ロボットの組み立て
(事前準備) この指示書を参照してEV3ロボットを組み立てなさい。
EV3RT 開発
このガイドURLを参考にしてEV3RT開発ワークスペースを用意しなさい。 サンプルプログラムを実行しなさい。
|
Note
|
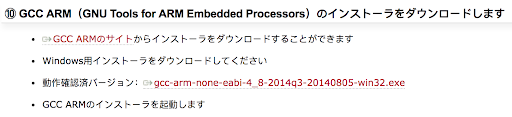
"Step 0: Check your environment" においては、指示に従ってCygwinをWindowsにインストールする 必要があります。その10のステップでは、 gcc-arm version 2014q3をインストールしてはいけません。 そのかわりに、GCC ARM page へ移動して "2016q3" と書かれたバージョンをインストールしなさい。 こちらの方が新しく良いです。 |
|
Note
|
In "Step 2: Prepare the configurator" においては、ビルド済みのバイナリを ダウンロードしなさい。ソースからコンパイルはしないこと。 |
宿題の提出
Redmineのイシューにコンパイルしたコードを添付しなさい。. ノートに作業で難しかった点を書きなさい。 ステータスを 'Feedback' としてインストラクタをアサインしなさい。